Какими показателями характеризуются пусковые свойства ад
Механическая характеристика представляет зависимость вращающего момента двигателя от его частоты вращения при неизменных напряжении и частоте питающей сети.
Пусковые свойства характеризуются значениями пускового момента Мп, минимального момента Мmin, максимального (критического) момента Мкр, пускового тока Iп или пусковой мощности Sп или их кратностями. Зависимость момента, отнесенного к номинальному моменту, от скольжения называется относительной механической характеристикой. Номинальный вращающий момент определяется по формуле:
Мн = 9550 Р2н/n1н, Нм
где Р2н – номинальная мощность, кВт,
n1н – номинальная частота вращения, об/мин.
Пусковые свойства стандартных асинхронных двигателей:
Мп/Мн – кратность пускового момента к номинальному;
Мкр./ Мн – кратность максимального момента к номинальному;
Мmin./ Мн – кратность минимального момента к номинальному;
Iп / Iн – кратность пускового тока к номинальному;
Sl = Sп/P2н — кратность пусковой мощности, кВа к номинальной Р2н ,кВт, регламентируются ГОСТ 28327 ( МЭК 60034 – 12).
Конкретные значения пусковых свойств двигателей приводятся в каталогах.
В соответствии с ГОСТ 28327 и МЭК 60034 – 12 стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам N – нормальный момент и Н – повышенный момент. Двигатели исполнения N должны быть рассчитаны на два последовательных пуска (с остановкой между пусками) из холодного состояния или на один пуск из нагретого состояния после работы при номинальной нагрузке.
Момент сопротивления нагрузки при пуске пропорционален квадрату частоты вращения и равен номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, g, кг.м2, не должно превышать рассчитанного по формуле:
γ = 0,04·Р2н0,9·ρ2,5,
где Р2н – номинальная мощность двигателя, кВт; ρ – число пар полюсов;
Двигатели исполнения Н должны допускать два последовательных пуска (с остановкой между пусками) из холодного состояния или один пуск из нагретого состояния при работе в номинальных условиях. Момент сопротивления нагрузки предполагается постоянным, равным номинальному моменту и не зависящим от частоты вращения, а значение внешнего момента инерции не должно превышать 50% значения, получаемого по приведенной выше формуле.
Механические характеристики асинхронных двигателей зависят от типа ротора, номинальной мощности, а также от числа полюсов. Однако разность в значениях момента при соответствующих скольжения у двигателей с числом полюсов 2, 4, 6 невелика и не превышает значения поля допуска на моменты.
Разновидности механических характеристик для различных исполнений асинхронных двигателей показаны на рис.8.4 .
Механические характеристики группы двигателей, представляющих отрезок серии, укладываются в некоторую зону. Среднюю линию этой зоны называют групповой механической характеристикой. Ширина зоны групповой характеристики не превышает поля допуска на моменты.
Обозначение и соединение выводов обмоток статора
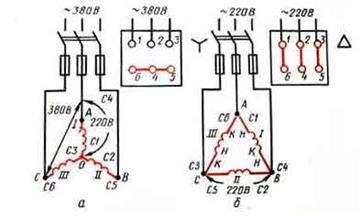
Начало и конец первой обмотки обозначают соответственно С1 и С4, второй — С2 и С5, третьей — С3 и С6. В зависимости от напряжения, на которое рассчитывается двигатель, обмотки, соединяют по двум основным схемам, получившим название «звезда» и «треугольник» .
На рисунке 8.5 показаны схемы включения обмоток статора асинхронного электродвигателя и соединение обмоток на доске зажимов: а — звездой, б — треугольником.
 Основные данные электродвигателей
Основные данные электродвигателей
Основные данные приводятся на заводском щитке, который крепится к корпусу электродвигателя. На нем записаны основные технические данные, достаточно полно характеризующие электродвигатель: номинальная мощность на валу (кВт), номинальное напряжение (В) с указанием соответствующей схемы соединения обмоток, сила тока (А) для каждой схемы соединения, номинальная частота вращения об/мин, частота тока в сети (гц), коэффициент мощности — cosf, коэффициент полезного действия — к. п. д. (%), класс изоляции, тип электродвигателя и его масса (кг).
Основные конструктивные исполнения асинхронных электродвигателей
Многообразие выполняемых работ и условий, в которых эксплуатируются асинхронные электродвигатели, обусловило то, что промышленность выпускает их в различном конструктивном исполнении. По степени защищенности электродвигатели выпускают:
Открытые — без специальных приспособлений для предохранения от случайного прикосновения к вращающимся и токоведущим частям, а также для предотвращения попадания внутрь посторонних предметов и т. п. (имеют ограниченное распространение).
Защищенные — имеющие приспособления для предохранения от случайного прикосновения к вращающимся и токоведущим частям, а также для предотвращения попадания внутрь посторонних предметов.
Каплезащищенные — снабженные приспособлениями для предохранения внутренних частей от попадания капель влаги, падающих отвесно.
Закрытые — у них внутренняя полость отделена от внешней среды оболочкой, препятствующей проникновению пыли.
Взрывозащищенные — т. е. защищенными настолько хорошо, что они допускаются к применению во взрывоопасных помещениях.
По способу монтажа различают фланцевые, вертикальные, встроенные электродвигатели и т. п.
Обозначение электродвигателей различного конструктивного исполнения
В зависимости от способа монтажа или установки электродвигателя на машине применяют следующие обозначения:
М101 — двигатель, устанавливаемый горизонтально и закрепляемый на лапах, которые приварены к станине или отлиты вместе с ней.
М201 — двигатель горизонтальной установки, подвешиваемый на лапах, которые расположены вверху на станине.
М301 — фланцевый двигатель, предназначенный для горизонтальной установки; на подшипниковом щите (со стороны конца вала) имеет кольцевой фланец с отверстиями для болтов и центрирующей заточкой.
М302 — двигатель вертикальной установки (рабочим концом вала вниз); закрепляется при помощи фланца на подшипниковом щите со стороны рабочего конца вала (двигатель опирается на фланец).
М303 — то же, что и М302, но для установки рабочим концом вала вверх; закрепляется при помощи фланца на подшипниковом щите со стороны рабочего конца вала (двигатель подвешивается на фланце).
М102 — то же, что и М302, но с закреплением только на лапах.
М103 — то же, что и М102, но устанавливается рабочим концом вале вверх.
М202 — то же, что и М302, но с закреплением при помощи фланца на щите и лап на станине.
М203 — то же, что и М202, но с установкой рабочего конца вала вверх.
Типы электродвигателей
Наряду с применением электродвигателей серий 4А и 5А находят применение и ранее выпускавшиеся электродвигатели единой серии А, АО, А2 и АО2. В помещениях с повышенной влажностью или с агрессивной средой используют электродвигатели специального назначения.
Электродвигатели серии 4(5)А — асинхронные трехфазные электродвигатели, выпущенные взамен электродвигателей единой серии А2 и АО2. Они по сравнению с электродвигателями серииА2 и АО2 имеют меньшие массу (в среднем на 18%), габариты, уровень шума и вибраций, большие пусковые моменты и повышенную эксплуатационную надежность.
Электродвигатель АИР — унифицированная серия асинхронных электродвигателей. Серия АИР охватывает диапазон мощностей от 0,06 до 315 кВт, характеризуемых значениями высоты оси вращения от 50 до 355 мм и частотами вращения 3000, 1500, 1000, 750 об/мин.
Электродвигатели асинхронные трехфазные переменного тока серии АИР предназначены для комплектации электроприводов различных механизмов во всех отраслях промышленности и аграрного комплекса. Частота 50 и 60 Гц, напряжение 220-660 В (АИР 71 — 220-440 В). Степень защиты электродвигателей IP54 (по заказу IP55), степень защиты IP55, класс изоляции F.
Структура условного обозначения электродвигателей

Обозначение серии электродвигателя:
АИР, А, 4А, 5А, АД, 7АVЕR – общепромышленные электродвигатели с привязкой мощностей по ГОСТ 51689-2000
АИС, 6А, IMM, RA, AIS – общепромышленные электродвигатели с привязкой мощностей по евростандарту DIN (CENELEC)
АИМ, АИМЛ, 4ВР, ВА, АВ, ВАО2, 1ВАО, 3В – взрывозащищенные электродвигатели
АИУ, ВРП, АВР, 3АВР, ВР – взрывозащищенные рудничные электродвигатели
А4, ДАЗО4, АОМ, ДАВ, АО4 – высоковольтные электродвигатели
Признак модификации электродвигателя:
М – модернизированный электродвигатель (например: АДМ63А2У3)
К – электродвигатель с фазным ротором (например: 5АНК280A6)
Х – электродвигатель в алюминиевой станине (например: 5АМХ180М2У3)
Е – однофазный электродвигатель 220В (например: АИРЕ80С2У3)
Н – электродвигатель защищенного исполнения с самовентиляцией (например: 5АН200М2У3)
Ф – электродвигатель защищенного исполнения с принудительным охлаждением (например: 5АФ180М2У3)
С – электродвигатель с повышенным скольжением (например: АИРС180М4У3)
В – встраиваемый электродвигатель (например: АДМВ63В2У3)
Р – электродвигатель с повышенным пусковым моментом (например: АИРР180S4У3)
П – электродвигатель для привода вентиляторов в птицеводческих хозяйствах («птичник») (например: АИРП80А6У2)
Габарит (высота оси вращения вала над установочной поверхностью), мм:
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400…
Установочный размер или длина сердечника электродвигателя:
А, В, С – вариант длины сердечника электродвигателя
S, M, L – вариант длины сердечника и установочных размеров электродвигателя по длине станины
Конструктивная модификация:
Б – со встроенным датчиком температурной защиты
Б1 – электродвигатель с датчиками температурной защиты обмотки и подшипниковых узлов
Б2 – электродвигатель с датчиком температурной защиты обмотки и подогревателем
Е – со встроенным электромагнитным тормозом
Е2 – со встроенным электромагнитным тормозом и ручкой расторможения
Ж (Ж1, Ж2) – со специальным удлиненным концом вала (для моноблочных насосов)
Л – электродвигатель для приводов лифтов
Н – электродвигатель малошумного исполнения
П – электродвигатель повышенной точности по установочным размерам
Р3 – электродвигатель для мотор-редукторов
С – электродвигатель для станков-качалок
Тр — электродвигатель для осевых вентиляторов в системах охлаждения трансформаторов
УП – электродвигатель в пылезащищенного исполнения
Ф- электродвигатель хладономаслостойкого исполнения
Число пар полюсов электродвигателя:
2 (3000 об/мин); 4 (1500 об/мин); 6 (1000 об/мин); 8 (750 об/мин); 10 (600 об/мин); 12 (500 об/мин) 4/2, 6/4, 8/6, 12/4, 12/6, 6/4/2, 8/6/4 и т. д. – многоскоростные электродвигатели
Климатическое исполнение (ГОСТ 15150-69)
Электродвигатели, предназначенные для эксплуатации на суше, реках, озерах:
У – для макроклиматического района с умеренным климатом
УХЛ – для макроклиматических районов с умеренным и холодным климатом
ХЛ – для макроклиматического района с холодным климатом
Т – для макроклиматических районов как с сухим, так и с влажным тропическим климатом
ТВ – для макроклиматического района с влажным тропическим климатом
ТС – для макроклиматического района с сухим тропическим климатом
О – для всех макроклиматических районов на суше, кроме очень холодного (общеклиматическое исполнение)
Электродвигатели, предназначенные для эксплуатации в макроклиматических районах с морским климатом:
М – для макроклиматического района с умеренно-холодным морским климатом
ТМ – для макроклиматического района с тропическим морским климатом, в том числе для судов каботажного плавания или иных, предназначенных для плавания только в этом районе
ОМ – для макроклиматических районов как с умеренно-холодным, так и тропическим морским климатом, в том числе для судов неограниченного района плавания
Электродвигатели, предназначенные для эксплуатации во всех макроклиматических районах на суше и на море, кроме макроклиматического района с очень холодным климатом (всеклиматическое исполнение):
В – для всех макроклиматических районов на суше и на море, кроме очень холодного (всеклиматическое исполнение)
Категория размещения (ГОСТ 15150-69)
1 – электродвигатель для эксплуатации на открытом воздухе
2 – электродвигатель для эксплуатации под навесом, в палатках, кузовных прицепах и т.п.
3 – электродвигатель для эксплуатации в помещениях без регулируемых климатических условий
4 – электродвигатель для эксплуатации в помещениях с искусственно регулируемыми климатическими условиями
5 – электродвигатель для эксплуатации в помещениях с повышенной влажностью (подвалы, шахты, трюмы и т.п.)
К энергетическим характеристикам асинхронного двигателя относятся КПД двигателя(η) коэффициент мощности (cosφ) и скольжение S.
коэффициент полезного действия (η) вычисляется как отношение полезной мощности на валу двигателя Р2 кВт, к активной мощности, потребляемой двигателем из сети Р1 кВт;
η = Р2/ Р1 коэффициент мощности (cos(φ)вычисляется как отношение потребляемой активной мощности Р1 кВт, к полной мощности, потребляемой из сети S1 кВА;
По ГОСТ Р. 51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
Причем КПД и cosφ асинхронного двигателя определяются и нагрузкой машины. В справочниках по электрическим машинам можно увидеть эти зависимости.
Линейный ток двигателя можно определить исходя из номинальной полезной мощность (Р2, кВт), номинального напряжения (UH, В ), КПД (η) и cosφ.
Мощность, потребляемая из сети можно определить из формулы:
Скольжение вычисляется как разницу между номинальной n1 и синхронной nc частотой вращения двигателя, приведенной к номинальной скорости двигателя n1:
Номинальную частоту вращения ротора n1 или скольжение (S, %)можно определить по каталогу двигателя или прочесть на его шильдике.
Механические и пусковые характеристики асинхронного двигателя
Одной из основных характеристик асинхронного двигателя, является механическая характеристика. Механической характеристикой называют зависимость скорости вращения или скольжения от вращающего момента на валу двигателя. Она позволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Соответственно, зависимость скорости вращения или скольжения от тока статора называют электромеханической характеристикой.
Механическая характеристика асинхронного двигателя определяет зависимость момента на валу двигателя от скольжения, при сохранении неизменного напряжении и частоты питающей сети
Пусковые характеристики определяют величину пускового моментаMп, минимального момента Мmin, максимального или критического момента Мкр., пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
Номинальный вращающий момент можно определить по формуле:
P2н- номинальная мощность , кВт,
N1н- номинальная частота вращенияю, об/мин.
Пусковые характеристики асинхронного двигателя
Пусковые характеристики асинхронного двигателя регламентирует ГОСТ 28327 ( МЭК 60034 — 12), а их значения приводятся в каталогах. Стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам, которые определены в ГОСТ 28327 и МЭК 60034-12:
N – двигатели с нормальный моментом;
Н –двигатели с повышенным моментом.
Двигатели , изготовленные в исполнении N, рассчитывают на два последовательных пуска с остановкой между пусками из холодного состояния или на один пуск из нагретого состояния, после работы при номинальной нагрузке.
Момент сопротивления нагрузки при запуске прямо пропорционален квадрату частоты вращения и равняется номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, γ , кг*м2, не должно превышать рассчитанного по формуле
где Р-номинальная мощность двигателя, кВт;
р — число пар полюсов;
При построении характеристики предполагается, что момент сопротивления нагрузки остается постоянным и равен номинальному моменту. Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Механические характеристики асинхронных мшин зависят в том числе и от типа ротора, его номинальной мощности, и от числа пар полюсов.
Ввиду того, что разность в значениях момента при соответствующих скольжениях у двигателей с различным числом пар полюсов невелика, и не превышает значения поля допуска на моменты. Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
1 — исполнение N; 2 — исполнение Н; 3 — с повышенным скольжением. Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
Цель работы: ознакомиться с
лабораторным стендом,получить
практические навыки пуска электрических
двигателей и проанализировать значения
максимальных пусковых токов при различных
методах пуска.
1.1. Основные теоретические положения
1.1.1. Пусковые свойства асинхронного двигателя (ад)
Пуск асинхронного
двигателя сопровождается переходным
процессом, обусловленным переходом
ротора и механически связанных с ним
частей исполнительного механизма из
состояния покоя в состояние равномерного
вращения, когда вращающий момент
двигателя уравновешивается суммой
противодействующих моментов, действующих
на ротор двигателя.
Пусковые
свойства двигателя определяются в
первую очередь значением пускового
тока и момента. Двигатель, обладающий
хорошими пусковыми свойствами, развивает
значительный пусковой момент при
сравнительно небольшом пусковом токе.
Пусковые свойства двигателей также
оцениваются следующими показателями:
продолжительность и плавность пуска,
сложность пусковой операции, экономичность
(стоимость и надежность пусковой
аппаратуры и потери энергии в ней).
Целесообразность
применения того или иного способа для
улучшения пусковых свойств двигателя
определяется конкретными условиями
эксплуатации.
1.1.2. Пуск асинхронного двигателя с короткозамкнутым ротором
Пуск
непосредственным включением в сеть.
Этот способ пуска, отличаясь простотой,
имеет существенный недостаток: в момент
подключения двигателя к сети в обмотке
статора возникает большой пусковой
ток, в пять – семь раз превышающий
номинальный ток двигателя. При значительной
мощности двигателя такой ток может
привести к заметному падению напряжения
сети и срабатыванию аппаратов защиты.
При небольшой механической инерционности
привода частота вращения двигателя
быстро достигает установившегося
значения и пусковой ток также быстро
спадает, не вызывая перегрева обмотки
статора. Однако этот способ пуска
благодаря своей простоте получил
наибольшее применение для двигателей
мощностью до 50 кВт и более.
Пуск
при пониженном напряжении.
Пусковой ток асинхронного двигателя
прямо пропорционален подведенному
напряжению. При необходимости уменьшения
пускового тока двигателя применяют
понижение напряжения, подаваемого на
обмотку статора. При этом следует
учитывать, что пусковой момент
пропорционален квадрату напряжения,
и, следовательно, будет снижаться в
большей степени, чем пусковой ток. Для
уменьшения подводимого напряжения к
двигателю существует несколько способов.
Для
асинхронных двигателей, работающих при
соединении обмоток статора «треугольником»,
можно применить следующий метод снижения
напряжения, позволяющий осуществить
пуск в два этапа. В начальный момент
пуска обмотку статора соединяют в схему
«звезда». При этом напряжение, приложенное
к фазе обмотки статора, и первый бросок
тока в ней понижается в √3 раз. Далее
после достижения ротором частоты
вращения близкой к установившейся,
переключают схему соединения обмотки
статора на «треугольник» и фазные
обмотки двигателя оказываются под
номинальным напряжением. Возникающий
при этом второй бросок тока оказывается
незначительным.
Другой
способ снижения напряжения предполагает
подключение на первом этапе последовательно
с обмоткой статора дополнительного
индуктивного сопротивления. При этом
напряжение, подведенное к обмотке
статора, оказывается меньше напряжения
питающей сети на величину падения
напряжения на подключенном сопротивлении.
На втором этапе дополнительное
сопротивление шунтируется (выводится
из электрической цепи).
Также
для снижения напряжения используется
автотрансформаторный пуск, осуществляемый
в три этапа. На первом этапе напряжение
на обмотку статора подается со вторичной
обмотки автотрансформатора. На втором
этапе размыкают общую точку в схеме
«звезда», в которую собраны обмотки
автотрансформатора. На третьем этапе
автотрансформатор шунтируется. При
этом на каждом этапе напряжение,
подаваемое на обмотку статора и ток в
ней, скачкообразно увеличиваются.
Увеличение этапов
(ступеней) пуска приводит к уменьшению
бросков тока на каждом этапе.
В
условиях лаборатории зачастую для
снижения напряжения при пуске асинхронного
двигателя можно применить лабораторный
автотрансформатор (ЛАТР), позволяющий
осуществить плавное увеличение питающего
напряжения без бросков тока.
Плавный
пуск асинхронного двигателя можно также
осуществить путем плавного повышения
частоты питающего напряжения с помощью
статического преобразователя частоты.
В процессе пуска плавно увеличивается
скорость вращения магнитного поля и,
следовательно, ротора. При этом современные
преобразователи частоты позволяют
одновременно с частотой питающего
напряжения регулировать его действующее
значение, а значит и пусковой момент.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #