Каким свойством обладает сила
 Механическое взаимодействие – один из видов взаимодействия материи, способный вызвать изменение механического движения материальных тел.
Механическое взаимодействие – один из видов взаимодействия материи, способный вызвать изменение механического движения материальных тел.
Сила характеризует количественную сторону механического взаимодействия. Таким образом, когда говорят, что на тело действуют силы, то это значит, что на него воздействуют другие тела (или физические поля). Не всегда, впрочем, сила действительно приводит к изменению движению тела; такое изменение может блокироваться действием других сил. С учетом сказанного запишем:
Сила (ньютонова) – мера механического воздействия на некото- рое материальное тело со стороны другого материального тела (или физического поля); она характеризует интенсивность и направление этого воздействия. Это, разумеется, не определение, а лишь пояснение к понятию силы. Поскольку понятие силы – фундаментальное, то его точный смысл раскрывается в аксиомах механики.
Пока же мы отметим вот что. Оговорка “ньютонова” сделана потому, что в динамике мы встретимся с другими величинами, также именуемыми силами, которые, однако, не являются мерами механического взаимодействия. В этом же семестре речь будет идти именно о ньютоновых силах, и мы для краткости будем называть их просто силами.
Далее, под словом “мера” в механике и в физике понимается физическая величина, которая служит для количественного описания какого-либо свойства или отношения. В данном случае речь идет об описании именно механического взаимодействия (а бывают еще, как Вы знаете, и другие взаимодействия – тепло- вые, химические и прочие).
В физике элементарных частиц выделяют четыре фундаментальных взаимодействия: сильное, электромагнитное, слабое и гравитационное. Эти четыре взаимодействия лежат в основе всех наблюдаемых явлений – относящихся как к механике, так и к другим разделам естествознания.
Однако в макромире фундаментальные взаимодействия проявляются, как правило, опосредованно, и нам приходится иметь дело со значительно более широким перечнем взаимодействий (уже не обязательно фундаментальных). Если говорить о механических взаимодействиях, то речь может идти о силах различного происхождения.
Примеры сил: силы тяжести, силы упругости, архимедовы силы, силы сопротивления среды и др. В большинстве задач механики, впрочем, физическая природа тех или иных сил обычно интереса не представляет.
Ещe мы, поясняя понятие силы, говорили об интенсивности и направлении воздействия. Это означает, что сила является векторной величиной. Именно, это – вектор, приложенный к определeнной точке материального тела. Поэтому можно говорить о таких характеристиках силы.
Сила характеризуется:
1) величиной (модулем);
2) направлением;
3) точкой приложения.
К сожалению, на экзамене нередко приходится встречаться с полным пренебрежением к этому правилу. В лучшем случае экзаменатор в этой ситуации поступит так: вздохнет и попросит студента быстренько проставить обозначения векторов в тексте ответа на поставленный вопрос. Если студент не сумеет правильно проставить обозначения – это первый шаг на пути к получению “двойки”. Поэтому, пожалуйста, не игнорируйте в своих конспектах черту, если она написана на доске.
Круглые скобки с запятой в середине обозначают скалярное произведение векторов (запятая при этом разделяет сомножители). Обратите внимание: во многих книгах скалярное произведение обозначается иначе – точкой между век- торами, причем точку обычно можно опустить.
Но мы будем придерживаться именно таких обозначений (они тоже достаточно распространены). Помимо всего прочего, они позволяют избежать путаницы (ведь скалярное произведение векторов нужно отличать от обычного произведения двух скаляров).
Пока мы говорили только о векторе силы. Но понятие силы не сводится к понятию ее вектора. Важна еще и точка приложения силы: ведь если тот же по величине и направлению вектор силы приложить в другой точке тела, то его движение может измениться.
В геометрии принята следующая терминология. Свободный вектор (или просто вектор) – вектор, характеризуемый только модулем и направлением. Связанный вектор – вектор, характеризуемый еще и точкой приложения. Иногда используют такие обозначения.
Через u—.A обозначается связанный вектор, получаемый, если свободный вектор u— приложить в точке A. Обратите внимание: здесь точка пишется не в середине строки (как при умножении чисел), а на ее нижней линии. Таким образом, можно сделать следующий вывод. Итак, сила – связанный вектор (полное обозначение: F—-.A).
Там, где нам потребуется подчеркнуть наличие у силы определенной точки приложения, мы будем пользоваться именно этим полным обозначением. Там, где точка приложения силы будет заранее оговорена, мы будем применять сокращенное обозначение, обозначая силу просто F—- (т.е. так же, как и вектор силы). О точке приложения силы нужно сказать следующее: Если сила действует на материальную точку, то точкой приложения служит сама эта точка.
Если сила действует на материальное тело, то точкой приложения служит точка тела (она может меняться с течением времени). В общем случае точка приложения силы не может лежать вне тела. Если тело – абсолютно твердое, то данное ограничение можно снять; но об этом мы будем говорить позже.
Возникает вопрос: а как можно на практике задать точку приложения силы? Любую точку можно задать, например, ее радиус-вектором, проведенным из некоторого полюса. Полюс – произвольно выделенная точка (положение которой обычно предполагается известным).
Раз здесь говорится “обычно”, то текст в скобках Вы вполне можете игнорировать. Часто бывает так: взяли некоторую точку и объявили ее полюсом (и будет она с этого времени считаться таковым). Но для задания положения точки приложения силы нам как раз нужно знать положение полюса. Можно – но не обязательно – принять за полюс начало системы координат.
Употребляют оба обозначения, но первое предпочтительнее: вектор обозначается одной буквой, а буква “r” напоминает, что речь идет именно о радиус- векторе, или шестью скалярами (Fx , Fy , Fz , xA , yA , zA ). Это – удобно, и так поступают часто. Но задать силу можно также иным способом, который мы рассмотрим в следующем пункте.
Страница 1 из 8
 Понятие «сила» прежде всего физическое. В механике оно выражает меру взаимодействия тел, причину их движения. Поэтому в физическом смысле – как векторная величина – сила понимается в том случае, когда рассматривается количественная сторона взаимодействия человека, скажем, с опорой, снарядом или другим внешним объектом. Иными словами, в данном случае через силу оценивается результат движения, его рабочий эффект.
Понятие «сила» прежде всего физическое. В механике оно выражает меру взаимодействия тел, причину их движения. Поэтому в физическом смысле – как векторная величина – сила понимается в том случае, когда рассматривается количественная сторона взаимодействия человека, скажем, с опорой, снарядом или другим внешним объектом. Иными словами, в данном случае через силу оценивается результат движения, его рабочий эффект.
Если же речь идет об источнике движения, то, говоря о силе, имеют в виду способность человека производить работу, и эта способность выступает как причина перемещения тела или его отдельных звеньев. В данном случае имеется в виду сила тяги мышц человека, то есть явление физиологическое.
И, наконец, понятие «сила» используется как одна из качественных характеристик произвольных движений человека, решающих конкретную двигательную задачу. Здесь сила вместе с такими критериями, как быстрота, выносливость, ловкость и т. п., выступает в качестве педагогического понятия, оценивающего качественную сторону выполняемого движения (Ю. В. Верхошанский, 1977).
Сила человека определяется как его способность преодолевать внешнее сопротивление посредством мышечных усилий (Теория и методика физического воспитания, 1976). То есть под понятием «сила» подразумевают любую способность человека напряжением мышц преодолевать механические и биомеханические силы, препятствующие действию, противодействовать им, обеспечивая тем самым эффект действия (вопреки препятствующим силам тяжести, инерции, сопротивления внешней среды и т.п.).
В зависимости от условий, характера и величины проявления мышечной силы в спортивной практике принято различать несколько разновидностей силовых качеств.
В том случае, когда усилия спортсмена движением не сопровождаются говорят о статическом (изометрическом) режиме работы мышц («статическая сила»). В статическом режиме напряженные мышцы не изменяют своей длины. Статическая сила характеризуется двумя ее особенностями проявления (В. В. Кузнецов, 1975; цит. по: Ж. К. Холодов, В. С. Кузнецов, 2003):
1) при напряжении мышц за счет активных волевых усилий человека (активная статическая сила);
2) при попытке внешних сил или под воздействием собственного веса человека насильственно растянуть напряженную мышцу (пассивная статическая сила).
Но чаще всего сила проявляется в движении, в так называемом динамическом режиме («динамическая сила»).
Динамическая работа мышц происходит либо в преодолевающем режиме, либо в уступающем. В первом случае работающие мышцы сокращаются и укорачиваются (например, при выжимании штанги), во втором — находясь в напряженном состоянии, они растягиваются и удлиняются (например, при амортизационном сгибании ног в момент приземления после прыжка). Кроме того, динамическая работа может происходить с разной скоростью, с различными ускорениями и замедлениями, а также с равномерным проявлением силы. Последнее при разной скорости движения называют изотоническим режимом, а при постоянной скорости движения — изокинетическими (Н. Г. Озолин, 2003).
По характеру усилий в динамической силе выделяют три разновидности (по В. Кузнецову; цит. по: С. М. Вайцеховский, 1971):
— взрывную силу – проявление силы с максимальным ускорением, что характерно, например, для так называемых скоростно-силовых упражнений: прыжков, метаний, спринтерского бега, отдельных элементов борьбы, бокса, спортивных игр и пр.;
— быструю силу – проявление силы с немаксимальным ускорением, например, при выполнении быстрых (но не предельно быстрых) движений в беге, плавании, велосипедном спорте и др.;
— медленную силу, проявляемую при сравнительно медленных движениях, практически без ускорения. Типичными примерами являются жим штанги, выход в упор силой на кольцах или перекладине.
Оценивая величину усилия в том или ином упражнении или простом движении, применяют термины «абсолютная» и «относительная» сила.
Тестирование онлайн
Что надо знать о силе
Сила — векторная величина. Необходимо знать точку приложения и направление каждой силы. Важно уметь определить какие именно силы действуют на тело и в каком направлении. Сила обозначается как , измеряется в Ньютонах. Для того, чтобы различать силы, их обозначают следующим образом
Ниже представлены основные силы, действующие в природе. Придумывать не существующие силы при решении задач нельзя!
Сил в природе много. Здесь рассмотрены силы, которые рассматриваются в школьном курсе физики при изучении динамики. А также упомянуты другие силы, которые будут рассмотрены в других разделах.
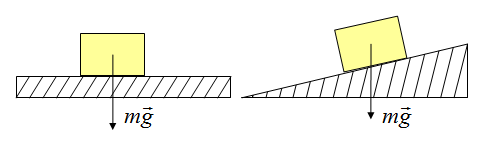
Сила тяжести
На каждое тело, находящееся на планете, действует гравитация Земли. Сила, с которой Земля притягивает каждое тело, определяется по формуле

Точка приложения находится в центре тяжести тела. Сила тяжести всегда направлена вертикально вниз.
Сила трения
Познакомимся с силой трения. Эта сила возникает при движении тел и соприкосновении двух поверхностей. Возникает сила в результате того, что поверхности, если рассмотреть под микроскопом, не являются гладкими, как кажутся. Определяется сила трения по формуле:

Сила приложена в точке соприкосновения двух поверхностей. Направлена в сторону противоположную движению.
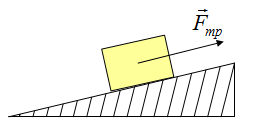
Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила реакции опоры
Представим очень тяжелый предмет, лежащий на столе. Стол прогибается под тяжестью предмета. Но согласно третьему закону Ньютона стол воздействует на предмет с точно такой же силой, что и предмет на стол. Сила направлена противоположно силе, с которой предмет давит на стол. То есть вверх. Эта сила называется реакцией опоры. Название силы «говорит» реагирует опора. Эта сила возникает всегда, когда есть воздействие на опору. Природа ее возникновения на молекулярном уровне. Предмет как бы деформировал привычное положение и связи молекул (внутри стола), они, в свою очередь, стремятся вернуться в свое первоначальное состояние, «сопротивляются».
Абсолютно любое тело, даже очень легкое (например,карандаш, лежащий на столе), на микроуровне деформирует опору. Поэтому возникает реакция опоры.
Специальной формулы для нахождения этой силы нет. Обозначают ее буквой , но эта сила просто отдельный вид силы упругости, поэтому она может быть обозначена и как
Сила приложена в точке соприкосновения предмета с опорой. Направлена перпендикулярно опоре.
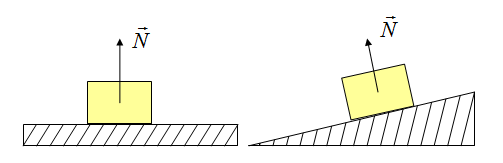
Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила упругости
Это сила возникает в результате деформации (изменения первоначального состояния вещества). Например, когда растягиваем пружину, мы увеличиваем расстояние между молекулами материала пружины. Когда сжимаем пружину — уменьшаем. Когда перекручиваем или сдвигаем. Во всех этих примерах возникает сила, которая препятствует деформации — сила упругости.
Закон Гука

Сила упругости направлена противоположно деформации.

Так как тело представляем в виде материальной точки, силу можно изображать с центра
При последовательном соединении, например, пружин жесткость рассчитывается по формуле

При параллельном соединении жесткость

Жесткость образца. Модуль Юнга.

Модуль Юнга характеризует упругие свойства вещества. Это постоянная величина, зависящая только от материала, его физического состояния. Характеризует способность материала сопротивляться деформации растяжения или сжатия. Значение модуля Юнга табличное.
Подробнее о свойствах твердых тел здесь.
Вес тела
Вес тела — это сила, с которой предмет воздействует на опору. Вы скажете, так это же сила тяжести! Путаница происходит в следующем: действительно часто вес тела равен силе тяжести, но это силы совершенно разные. Сила тяжести — сила, которая возникает в результате взаимодействия с Землей. Вес — результат взаимодействия с опорой. Сила тяжести приложена в центре тяжести предмета, вес же — сила, которая приложена на опору (не на предмет)!
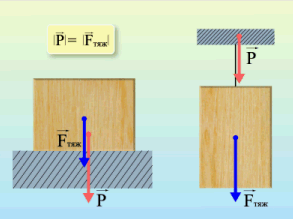
Формулы определения веса нет. Обозначается эта силы буквой .
Сила реакции опоры или сила упругости возникает в ответ на воздействие предмета на подвес или опору, поэтому вес тела всегда численно одинаков силе упругости, но имеет противоположное направление.

Сила реакции опоры и вес — силы одной природы, согласно 3 закону Ньютона они равны и противоположно направлены. Вес — это сила, которая действует на опору, а не на тело. Сила тяжести действует на тело.
Вес тела может быть не равен силе тяжести. Может быть как больше, так и меньше, а может быть и такое, что вес равен нулю. Это состояние называется невесомостью. Невесомость — состояние, когда предмет не взаимодействует с опорой, например, состояние полета: сила тяжести есть, а вес равен нулю!

Определить направление ускорения возможно, если определить, куда направлена равнодействующая сила
Обратите внимание, вес — сила, измеряется в Ньютонах. Как верно ответить на вопрос: «Сколько ты весишь»? Мы отвечаем 50 кг, называя не вес, а свою массу! В этом примере, наш вес равен силе тяжести, то есть примерно 500Н!
Перегрузка — отношение веса к силе тяжести
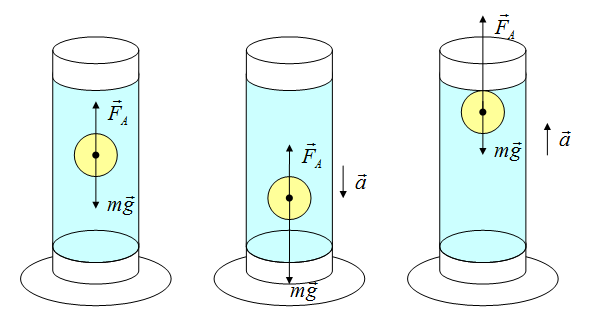
Сила Архимеда
Сила возникает в результате взаимодействия тела с жидкость (газом), при его погружении в жидкость (или газ). Эта сила выталкивает тело из воды (газа). Поэтому направлена вертикально вверх (выталкивает). Определяется по формуле:
В воздухе силой Архимеда пренебрегаем.
Если сила Архимеда равна силе тяжести, тело плавает. Если сила Архимеда больше, то оно поднимается на поверхность жидкости, если меньше — тонет.
Электрические силы
Существуют силы электрического происхождения. Возникают при наличии электрического заряда. Эти силы, такие как сила Кулона, сила Ампера, сила Лоренца, подробно рассмотрены в разделе Электричество.
Схематичное обозначение действующих на тело сил
Часто тело моделируют материальной точкой. Поэтому на схемах различные точки приложения переносят в одну точку — в центр, а тело изображают схематично кругом или прямоугольником.
Для того, чтобы верно обозначить силы, необходимо перечислить все тела, с которыми исследуемое тело взаимодействует. Определить, что происходит в результате взаимодействия с каждым: трение, деформация, притяжение или может быть отталкивание. Определить вид силы, верно обозначить направление. Внимание! Количество сил будет совпадать с числом тел, с которыми происходит взаимодействие.
Главное запомнить
1) Силы и их природа;
2) Направление сил;
3) Уметь обозначить действующие силы
Силы трения*
Взаимосвязь силы тяжести, закона гравитации и ускорения свободного падения*
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 12 июня 2020;
проверки требует 1 правка.
Фундамента́льные взаимоде́йствия — качественно различающиеся типы взаимодействия элементарных частиц и составленных из них тел.
На сегодня достоверно известно существование четырёх фундаментальных взаимодействий (не считая поля Хиггса):
- гравитационного;
- электромагнитного;
- сильного;
- слабого.
При этом электромагнитное и слабое взаимодействия являются проявлениями единого электрослабого взаимодействия.
Ведутся поиски других типов фундаментальных взаимодействий, как в явлениях микромира, так и в космических масштабах, однако пока какого-либо другого типа фундаментального взаимодействия не обнаружено (см. Пятая сила).
В теориях Великого объединения предполагается существование электроядерного взаимодействия. Также, возможно, нарушение CP-инвариантности вызывается сверхслабым взаимодействием.
Единственной гипотезой о количестве фундаментальных физических взаимодействий — почему в природе именно то количество взаимодействий, которое предполагают существующими — была высказана лишь относительно недавно в МГУ. Предполагается, что количество фундаментальных взаимодействий зависит от вида коэффициента затухания в рассматриваемых уравнениях колебаний. При этом некоммутативная структура этого коэффициента свидетельствует в пользу существования поля Хиггса в качестве фундаментального взаимодействия[1].
Сводная таблица[править | править код]
История[править | править код]
Ньютон в своём втором законе (1687 г.[3]) постулировал, что причиной изменения движения тел является сила. Физикам было известно множество самых разнообразных сил: сила тяжести, сила натяжения нити, сила сжатия пружины, сила столкновения тел, сила трения, сила сопротивления воздуха, сила взрыва и т. д.
Исследования XVIII—XIX веков привели к открытию атомарной структуры вещества, и стало понятно, что все разнообразие этих сил есть результат взаимодействия атомов друг с другом. Поскольку основной вид межатомного взаимодействия — электромагнитное, то, как оказалось, большинство этих сил — лишь различные проявления электромагнитного взаимодействия. Одно из исключений составляет, например, сила тяжести, причиной которой является гравитационное взаимодействие между телами, обладающими массой.
Таким образом, к началу XX века выяснилось, что все известные к тому моменту силы сводятся к двум фундаментальным взаимодействиям: электромагнитному и гравитационному.
В 1930-е годы физики обнаружили, что ядра атомов состоят из нуклонов (протонов и нейтронов). Стало понятно, что ни электромагнитные, ни гравитационные взаимодействия не могут объяснить, что удерживает нуклоны в ядре. Было постулировано существование нового фундаментального взаимодействия: сильного взаимодействия. Однако в дальнейшем оказалось, что и этого недостаточно, чтобы объяснить некоторые явления в микромире. В частности, было непонятно, что заставляет распадаться свободный нейтрон. Тогда было постулировано существование слабого взаимодействия, и этого оказалось достаточно для описания всех до сих пор наблюдавшихся явлений в микромире.
После открытия бозона Хиггса поле Хиггса стали иногда называть пятым фундаментальным взаимодействием[4].
Создание единой теории фундаментальных взаимодействий[править | править код]
Первой из теорий взаимодействий стала теория электромагнетизма, созданная Максвеллом в 1863 году. Затем в 1915 году Эйнштейн сформулировал общую теорию относительности, описывающую гравитационное поле. Появилась идея построения единой теории фундаментальных взаимодействий (которых на тот момент было известно только два), подобно тому как Максвеллу удалось создать общее описание электрических и магнитных явлений. Такая единая теория объединила бы гравитацию и электромагнетизм в качестве частных проявлений некоего единого взаимодействия.
В течение первой половины XX века ряд физиков предприняли многочисленные попытки создания такой теории, однако ни одной полностью удовлетворительной модели выдвинуто не было. Это, в частности, связано с тем, что общая теория относительности и теория электромагнетизма различны по своей сути. Тяготение описывается искривлением пространства-времени, и в этом смысле гравитационное поле условно нематериально (эмпирически недискретно), но, как и прочие формы взаимодействия, распространяется с предельно допустимой скоростью света (см. Скорость гравитации), в то время как электромагнитное поле являет все необходимые атрибуты материи.
Во второй половине XX столетия задача построения единой теории осложнилась необходимостью внесения в неё слабого и сильного взаимодействий, а также необходимостью квантования теории.
В 1967 году Саламом и Вайнбергом была создана теория электрослабого взаимодействия, объединившая электромагнетизм и слабые взаимодействия. Позднее в 1973 году была предложена теория сильного взаимодействия (квантовая хромодинамика). На их основе была построена Стандартная модель элементарных частиц, описывающая электромагнитное, слабые и сильное взаимодействия.
Экспериментальная проверка Стандартной модели заключается в обнаружении предсказанных ею частиц и их свойств. В настоящий момент открыты все элементарные частицы Стандартной модели.
Таким образом, в настоящее время фундаментальные взаимодействия описываются двумя общепринятыми теориями: общей теорией относительности и Стандартной моделью. Их объединения пока достичь не удалось из-за трудностей создания квантовой теории гравитации. Для дальнейшего объединения фундаментальных взаимодействий используются различные подходы: теории струн, петлевая квантовая гравитация, а также М-теория.
См. также[править | править код]
- Нерешённые проблемы современной физики
- Пятая сила
- Теории Великого объединения
- Исключительно простая теория всего
- Единая теория поля
- Стандартная модель
- Сильное взаимодействие
- Электрослабое взаимодействие
- Слабое взаимодействие
- Гравитация
- Люди: Исаак Ньютон, Джеймс Максвелл, Альберт Эйнштейн, Хидэки Юкава, Ричард Фейнман, Марри Гелл-Ман, Нисидзима, Шелдон Глешоу, Абдус Салам, Стивен Вайнберг, Герард ‘т Хоофт, Дэвид Гросс, Эдвард Виттен, Говард Джорджи.