Каким свойством обладает поступательное движение твердого тела

Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 30 сентября 2017;
проверки требуют 11 правок.
Рисунок 1 Поступательное движение тела
Поступа́тельное движе́ние — механическое движение системы точек (абсолютно твёрдого тела), при котором отрезок прямой, связывающий две любые точки этого тела, форма и размеры которого во время движения не меняются, остаётся параллельным своему положению в любой предыдущий момент времени[1]. При поступательном движении все точки тела описывают одну и ту же траекторию (с точностью до постоянного смещения в пространстве) и в любой данный момент времени имеют одинаковые по направлению и абсолютной величине векторы скорости и ускорения, которые меняются синхронно для всех точек тела.
В общем случае поступательное движение происходит в трёхмерном пространстве, но его основная особенность — сохранение параллельности любого отрезка самому себе, остаётся в силе.
Математически поступательное движение по своему конечному результату эквивалентно параллельному переносу. Однако, рассматриваемое как физический процесс, оно представляет собой в трёхмерном пространстве вариант винтового движения (см. рисунок 2).
Основной закон динамики поступательного движения[править | править код]
Производная по времени от количества движения материальной точки или системы материальных точек относительно неподвижной (инерциальной) системы отсчёта равна главному вектору всех внешних сил, приложенных к системе.
Примеры поступательного движения[править | править код]
Поступательно движется, например, кабина лифта. Также, в первом приближении, поступательное движение совершает кабина колеса обозрения[2]
Поступательное движение в первом приближении (если пренебречь качанием ступни) совершает педаль велосипеда, выполняющая при этом за полный цикл своего хода один поворот вокруг своей оси.
Связь движения тела и движения его точек[править | править код]
Рисунок 2 Пример трёхмерного поступательного движения тела
Если тело движется поступательно, то для описания его движения достаточно описать движение произвольной его точки (например, движение центра масс тела).
Одной из важнейших характеристик движения точки является её траектория, в общем случае представляющая собой пространственную кривую, которую можно представить в виде сопряжённых дуг различного радиуса, исходящего каждый из своего центра, положение которого может меняться во времени. В пределе и прямая может рассматриваться как дуга, радиус которой равен бесконечности.
В таком случае оказывается, что при поступательном движении в каждый заданный момент времени любая точка тела совершает поворот вокруг своего мгновенного центра поворота, причём длина радиуса в данный момент одинакова для всех точек тела. Одинаковы по величине и направлению и векторы скорости точек тела, а также испытываемые ими ускорения.
При решении задач теоретической механики бывает удобно рассматривать движение тела как сложение движения центра масс тела и вращательного движения самого тела вокруг центра масс (это обстоятельство принято во внимание при формулировке теоремы Кёнига).
Примеры устройств[править | править код]
Торговые весы, чашки которых движутся поступательно, но не прямолинейно
Принцип поступательного движения реализован в чертёжном приборе — пантографе, ведущее и ведомое плечо которого всегда остаются параллельными, то есть движутся поступательно. При этом любая точка на движущихся частях совершает в плоскости заданные движения, каждая вокруг своего мгновенного центра вращения с одинаковой для всех движущихся точек прибора угловой скоростью.
Существенно, что ведущее и ведомое плечо прибора, хотя и движущиеся согласно, представляют собой два разных тела.
Поэтому радиусы кривизны, по которым движутся заданные точки на ведущем и ведомом плече могут быть сделаны неодинаковыми, и именно в этом и заключается смысл использования прибора, позволяющего воспроизводить любую кривую на плоскости в масштабе, определяемом отношением длин плеч.
По сути дела пантограф обеспечивает синхронное поступательное движение системы двух тел: «читающего» и «пишущего», движение каждого из которых иллюстрируется приведённым выше чертежом.
См. также[править | править код]
- Плоскопараллельное движение
- Поворот
- Центростремительные и центробежные силы
- Механизм Кланна
Примечания[править | править код]
- ↑ По определению некое тело называется меняющим свою форму, если расстояние между его точками не остаётся постоянным. С таким телом нельзя связать никакого постоянного по длине отрезка, неизменно ориентированного в пространстве. Поэтому поступательно двигающееся тело можно считать (кинематически) абсолютно твёрдым, хотя это может быть и жидкая капля, и газовое облако, и звёздное скопление.
- ↑ Строго говоря, движение кабины колеса обозрения можно считать поступательным лишь в пределе бесконечно медленного вращения колеса, так как вращательное ускорение приводит к небольшим отклонениям подвешенной кабины от вертикали.
Литература[править | править код]
- Ньютон И. Математические начала натуральной философии. Пер. и прим. А. Н. Крылова. М.: Наука, 1989.
- С. Э. Хайкин. Силы инерции и невесомость. М.: Наука, 1967.
- Фриш С. А. и Тиморева А. В. Курс общей физики, Учебник для физико-математических и физико-технических факультетов государственных университетов, Том I. М.: ГИТТЛ, 1957.
- Поступательное движение // Физический энциклопедический словарь / Гл. ред. А. М. Прохоров. — М.: Советская энциклопедия, 1983. — С. 579. — 928 с. — 100 000 экз.
Ссылки[править | править код]
- В. И. Гервидс. Поступательное и вращательное движения (flash). НИЯУ МИФИ (10.03.2011). — Физические демонстрации. Дата обращения 19 декабря 2011.
2. Вращательное движение твердого тела.
3. Частные случаи вращательного движения.
Формула Эйлера.
В кинематике
твердого тела, к изложению которой мы
приступаем, решаются те же, что и в
кинематике точки, две основные задачи:
— задание
движения твердого тела;
— определение
основных кинематических характеристик
этого движения.
Решение первой
задачи сводится к определению необходимого
числа функций времени (уравнений
движения), однозначно определяющих
положение каждой точки тела в пространстве.
Решение второй задачи заключается в
определении зависимостей, позволяющих
по известным уравнениям движения
определить траекторию, а также скорость
и ускорение любой точки тела в любой
момент времени.
Различают пять
видов движения твердого тела:
поступательное, вращательное,
плоскопараллельное, сферическое и
свободное.
Первые два из них (поступательное и
вращательное) называют простейшими.
Поступательное
движение твердого тела и его свойства.
Поступательным
называется такое движение тела, при
котором любая прямая, соединяющая две
произвольные точки тела, перемещается,
оставаясь параллельной своему начальному
направлению.
Поступательное
движение может быть как прямолинейным,
так и криволинейным (рис.2.16).

Рис.
2.16. Примеры поступательного движения
твердого тела
Докажем следующие
свойства
поступательного движения.
Если тело движется поступательно, то
все его точки в каждый момент времени
имеют одинаковые скорости и ускорения,
а траектории всех точек при наложении
совпадают.
Пусть тело движется
поступательно. Тогда (см. рис.2.17) для
любых двух его точек А
и В,
в любой момент времени справедливо
следующее векторное выражение:
![]() ,
,
где вектор
![]() по определению поступательного движения
по определению поступательного движения
не изменяется ни по величине, ни по
направлению. Это означает, что траектории
точекА
и В
смещены относительно друг друга на
постоянный вектор и, следовательно, при
наложении совпадут.

Рис.
2.17. К определению свойств поступательного
движения
Дифференцируя
вышеприведенное векторное выражение
по времени, получаем:
 ,
,
или
![]()
так как последняя
производная (как производная от
постоянного вектора
![]() )
)
равна нулю. Дифференцируя равенство
скоростей, получаем равенство ускорений:
![]() .
.
Доказанные свойства
позволяют свести изучение поступательного
движения тела к изучению движения любой
одной из его точек методами кинематики
точки.
Вращательное
движение твердого тела
Движение
твердого тела, при котором все точки,
лежащие на некоторой прямой, принадлежащей
телу или неизменно с ним связанной,
остаются неподвижными в рассматриваемой
системе отсчета, называется вращательным
движением. Упомянутая
выше прямая называется осью
вращения.

Рис.
2.18. Вращение тела вокруг неподвижной
оси
Очевидно, что все
точки тела, не лежащие на оси вращения,
будут двигаться по окружностям, плоскости
которых перпендикулярны оси вращения,
а центры лежат на этой оси.
Положение тела
при вращательном движении можно
однозначно определить углом
между неподвижной полуплоскостью I
и подвижной, вращающейся вместе с телом,
полуплоскостью II,
проходящими через ось вращения.
Положительным направлением отсчета
угла называемого
также угловой координатой, принято
считать вращение против хода часовой
стрелки, если смотреть навстречу оси
вращения z
. Сам угол
принято измерять в радианах.
Для однозначного
определения положения тела в любой
момент времени, необходимо располагать
зависимостью угловой координаты
от времени:
=
(t)
. (2.25)
Уравнение (2.25)
называется уравнением
или законом вращательного движения
твердого тела.
Введем основные
кинематические характеристики
вращательного движения — угловую скорость
и угловое ускорение .
Пусть за промежуток времени t
тело повернется на угол.
Тогда отношение t называют
средней угловой скоростью за этот
промежуток времени: ср
= t. Предел
данного отношения при стремлении t
к нулю, называют мгновенной или просто
угловой скоростью:
 .
.
(2.26)
Аналогичным образом
вводится понятие углового ускорения:
 .
.
(2.27)
Согласно (2.26) и
(2.27) угловая скорость и угловое ускорение
измеряются в радианах в секунду (рад/с)
и в радианах в секунду за секунду
(рад/с2)
соответственно. Так как радиан является
безразмерной величиной, допустимы и
более компактные обозначения — (с
-1)
и (с -2).
Для того, чтобы
использовать угловую скорость и угловое
ускорение в векторных выражениях,
необходимо рассматривать угловую
скорость как вектор, с модулем равным
d/dt
и направленным вдоль оси вращения в ту
сторону, откуда вращения тела видно
происходящим против хода часовой
стрелки. Вектор углового ускорения,
модуль которого равен d/dt,
также считают направленным вдоль оси
вращения. Он совпадает по направлению
с вектором угловой скорости при
ускоренном вращении и противоположен
ему при замедленном вращении тела (рис.
2.19). Необходимо отметить, что введенные
таким необычным способом векторы
называют псевдовекторами ( как бы
векторами), чтобы подчеркнуть их некоторую
“векторную неполноценность”. Тем не
менее теперь становится возможна запись
следующей векторной формулы:
![]() ,
,
(2.28)
правильно отражающей
не только количественную связь
![]() и
и![]() ,
,
но и взаимосвязь направлений векторов![]() и
и![]() ,
,
отображенной на рисунке 2.19.

Рис.
2.19. Взаимосвязь направлений циe
Перейдем теперь
к определению индивидуальных кинематических
характеристик точек вращающегося тела
по известному закону вращательного
движения
![]() .
.
Для этого рассмотрим движение любой
точкиМ,
не лежащей на оси вращения. Пусть за
время dtтело
повернется на угол dа
точка М
переместится по дуге окружности радиуса
R
на расстояние dS(рис. 2.20).

Рис. 2.20. Связь
угловой скорости тела с линейными
скоростями его точек
Тогда ее скорость
будет равна
 ,
,
т.е.![]() (2.29)
(2.29)
Так как всех точки
тела вращаются с одной и той же угловой
скоростью, то из (2.29) следует, что линейные
скорости точек тела пропорциональны
их расстояниям от оси вращения. Для
определения ускорений воспользуемся
формулами (2.19) и (2.20):
 ,
,
(2.30)
 .
.
(2.31)
Полное ускорение
точки М
будет равно (рис. 2.21) геометрической
сумме
![]() и
и![]() :
:
![]() или
или
![]() .
.
(2.32)
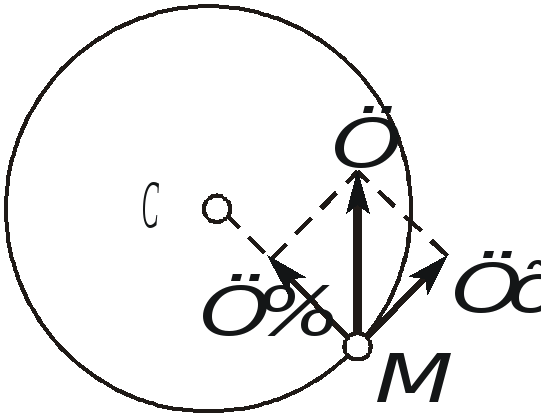
Рис. 2.21.
Ускорение точек тела при вращательном
движении
Рассмотрим
теперь частные случаи вращательного
движения
а) Равномерное
вращение
— вращение с постоянной угловой скоростью
(
= const):
,
![]() ,
,
![]() .
.
Пусть при t
= 0: =
, тогда С
= 0 и мы
получаем следующее уравнение или закон
равномерного вращения:
![]() .
.
(2.33)
в) Равнопеременное
вращение
— это вращение с постоянным угловым
ускорением (
= const):
 ,
,
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
![]()
 .
.
Пусть при t
= 0:
и
= 0, тогда С1
=
, C2
= 0. Подставляя
найденные значения констант интегрирования
в полученные выше выражения, получаем:
![]() ,
,
(2.34)
![]() .
.
(2.35)
В полученном законе
изменения угловой скорости (2.34) и в
уравнении равнопеременного вращения
(2.35), угловое ускорение
будет положительным при равноускоренном
вращении и отрицательным при
равнозамедленным.
В заключение
приведем вполне очевидные соотношения,
которые часто используются при решении
задач:
![]() ,
,

(2.36)
где N
— число оборотов, n
— угловая скорость в оборотах в минуту.
4.
Формула Эйлера
В заключение
получим векторные формулы для скорости
и ускорения точек в круговом движении.
Рассмотри движение точки М,
не лежащей на оси вращения (рис. 2.22).
Покажем, что ее скорость полностью
определяется формулой Эйлера :
![]() .
.
(2.37)

Рис.
2.22. Иллюстрация формулы Эйлера
Действительно,
модуль векторного произведения
![]() равенV=rsin
равенV=rsin
= R,
что совпадает
с выражением (2.29). Формула (2.34) правильно
определяет и направление вектора
скорости: вектор
![]() направлен перпендикулярно плоскости
направлен перпендикулярно плоскости
треугольникаОСМ
в ту сторону, откуда поворот от
![]() к
к![]() виден происходящим против хода часовой
виден происходящим против хода часовой
стрелки (т.е. вектор![]() направлен, как и полагается, по касательной
направлен, как и полагается, по касательной
к траектории в направлении вращения
тела).
Для вывода векторных
формул, определяющих ускорение,
продифференцируем формулу Эйлера по
времени:
 .
.
Учитывая, что
согласно (2.28) и (2.5)
 ,
,

получаем:
![]() ,
,
(2.38)
где
![]() ,
,
![]() .
.
(2.39)
В справедливости
выражений (2.36) можно убедиться
непосредственно, определив модули и
направления входящих в них векторных
произведений. Так согласно первой
формуле (2.39)
![]() ,
,
что совпадает с уже известным выражением
(2.30). Правильно определяется и направление
вектора![]() (см.
(см.
рис.2.22). Вторая формула (2.39) дает![]()
![]()
![]() [сравните с (2.31)].
[сравните с (2.31)].
Направлен вектор
![]() ,
,
как и положено, перпендикулярно плоскости,
в которой лежат перемножаемы векторы![]() внутрь
внутрь
траектории, откуда поворот от![]() к вектору
к вектору![]() виден
виден
происходящим против хода часовой
стрелки.
Лекция 14
Вопросы
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Движение твердого тела разделяют на виды:
- поступательное;
- вращательное по неподвижной оси;
- плоское;
- вращательное вокруг неподвижной точки;
- свободное.
Первые два из них – простейшие, а остальные представляют как комбинацию основных движений.
Поступательное криволинейное движение. Угол поворота тела
Определение 1
Поступательным называют движение твердого тела, при котором любая прямая, проведенная в нем, двигается, оставаясь параллельной своему начальному направлению.
Прямолинейное движение является поступательным, но не всякое поступательное будет прямолинейным. При наличии поступательного движения путь тела представляют в виде кривых линий.

Рисунок 1. Поступательное криволинейное движение кабин колеса обзора
Теорема 1
Свойства поступательного движения определяются теоремой: при поступательном движении все точки тела описывают одинаковые траектории и в каждый момент времени обладают одинаковыми по модулю и направлению значениями скорости и ускорения.
Следовательно, поступательное движение твердого тела определено движением любой его точки. Это сводится к задаче кинематики точки.
Определение 2
Если имеется поступательное движение, то общая скорость для всех точек тела υ→ называется скоростью поступательного движения, а ускорение a→ — ускорением поступательного движения. Изображение векторов υ→ и a→ принято указывать приложенными в любой точке тела.
Понятие о скорости и ускорении тела имеют смысл только при наличии поступательного движения. В других случаях точки тела характеризуются разными скоростями и ускорениями.
Определение 3
Вращательное движение абсолютно твердого тела вокруг неподвижной оси – это движение всех точек тела, находящихся в плоскостях, перпендикулярных неподвижной прямой, называемой осью вращения, и описывание окружностей, центры которых располагаются на этой оси.
Чтобы определить положение вращающегося тела, необходимо начертить ось вращения, вдоль которой направляется ось Az, полуплоскость – неподвижную, проходящую через тело и движущуюся с ним, как показано на рисунке 2.

Рисунок 2. Угол поворота тела
Положение тела в любой момент времени будет характеризоваться соответствующим знаком перед углом φ между полуплоскостями, который получил название угол поворота тела. При его откладывании, начиная от неподвижной плоскости (направление против хода часовой стрелки), угол принимает положительное значение, против плоскости – отрицательное. Измерение угла производится в радианах. Для определения положения тела в любой момент времени следует учитывать зависимость угла φ от t, то есть φ=f(t). Уравнение является законом вращательного движения твердого тела вокруг неподвижной оси.
При наличии такого вращения значения углов поворота радиус-вектора различных точек тела будут аналогичны.
Вращательное движение твердого тела характеризуется угловой скоростью ω и угловым ускорением ε.
Уравнения вращательного движения получают из уравнений поступательного, используя замены перемещения S на угловое перемещение φ, скорость υ на угловую скорость ω, а ускорение a на угловое ε.
Вращательное и поступательное движение. Формулы
| Поступательное | Вращательное |
| Равномерное | |
| s=υ·t | φ=ω·t |
| υ=const | ω=const |
| a=0 | ε=0 |
| Равнопеременное | |
| s=υ0t±at22 | φ=ω0t±ε·t22 |
| υ=υ0±a·t | ω=ω0±ε·t |
| a=const | ε=const |
| Неравномерное | |
| s=f(t) | φ=f(t) |
| υ=dsdt | ω=dφdt |
| a=dυdt=d2sdt2 | ε=dωdt=d2φdt2 |
Задачи на вращательное движение
Пример 1
Дана материальная точка, которая движется прямолинейно соответственно уравнению s=t4+2t2+5. Вычислить мгновенную скорость и ускорение точки в конце второй секунды после начала движения, среднюю скорость и пройденный за этот промежуток времени путь.
Дано: s=t4+2t2+5, t=2 с.
Найти: s; υ; υ; α.
Решение
s=24+2·22+5=29 м.
υ=dsdt=4t3+4t=4·23+4·2=37 м/с.
υ=∆s∆t=292=14,5 м/с.
a=dυdt=12t2+4=12·22+4=52 м/с2.
Ответ: s=29 м; υ=37 м/с; υ=14,5 м/с; α=52 м/с2
Пример 2
Задано тело, вращающееся вокруг неподвижной оси по уравнению φ=t4+2t2+5. Произвести вычисление мгновенной угловой скорости, углового ускорения тела в конце 2 секунды после начала движения, средней угловой скорости и угла поворота за данный промежуток времени.
Дано: φ=t4+2t2+5, t=2 с.
Найти: φ; ω; ω; ε.
Решение
φ=24+2·22+5=29 рад.
ω=dφdt=4t3+4t=4·23+4·2=37 рад/с.
ω=∆φ∆t=292=14,5 рад/с.
ε=dωdt=122+4=12·22+4=52 рад/с2.
Ответ: φ=29 рад; ω=37 рад/с; ω=14,5 рад/с; ε=52 рад/с2.